机器视觉及智能系统江西省重点实验室、
江西理工大学机器人与智能装备技术研究所
简 介
机器视觉及智能系统江西省重点实验室、江西理工大学机器人与智能装备技术研究所是专门从事机器视觉及智能系统、智能检测与机器人、机电系统控制和智能制造装备技术研究与系统开发的科研机构,现有研究人员40余人,其中教授5人,副教授8人,讲师、工程师等中级职称人员8人,研究生20余人。
重点实验室及研究所已形成了矿冶机械及智能装备、机电系统控制与机器人技术、机器视觉与智能检测、机器学习及智能系统、生产过程建模与控制及系统节能等五个稳定的特色研究方向。多年来,以服务冶金行业和地方经济发展为宗旨,完成了国家及省部级等各类科研项目50余项,获得国家及省部等各级科技奖励10余项,发明专利和软件登记10余件。重点实验室及研究所坚持产学研合作和成果转化,与洪都先进智能工程研究所、清华泰豪集团、江西斯源科技、广州珐玛珈智能设备、山东爱通工业机器人科技、赣州金信诺电缆技术、赣州天力电子、赣州群星机器人、赣州德业电子科技、韶能集团韶关宏大齿轮、香港禾盈集团、江西铜业等公司建立了长期的产学研合作伙伴关系,促进了成果产业化。成果已成功应用在国内外冶金、汽车零部件制造、建材、塑胶五金、电子、环境巡检等企业,得到了用户的一直好评,已成为行业有较大影响的机器视觉、机器人与智能装备技术研发基地之一。
重点实验室及研究所拥有的主要成果有:永久阴极机器人剥片自动线、电解阳极板提取机器人、铜铅锌生产物料转运自动线、钨冶金高效强化设备、有色金属步进式在线连续溶浸机器人系统、亚砷酸成品搬运码垛机器人、全自动钢带打捆机、薄壁零件调频感应加热压力淬火一体化机床、汽车同步器齿圈压力淬火自动机床、汽车同步器齿圈压力淬火工件转运装卸自动线、汽车同步器装配机器人、塑胶五金件自动装配机组、汽车零部件质量检测与智能制造系统、瓶装药液可见异物视觉检测机器人系统、高频变压器制造质量视觉检测系统、电站及地下管廊智能巡检机器人系统、基于物联网的塔机和建筑升降机安全运行监测系统、砖坯机器人码垛搬运自动线、砖块自动捆包生产线等技术装备、高效免拆带的有色金属铸锭打包机、有色金属全自动定量浇铸机组(圆盘或直线型)、电解残极洗涤与加料机组等。
项目1:
项目名称
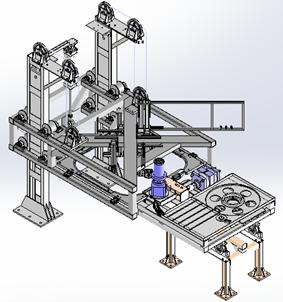
汽车同步器齿圈感应加热压淬工件转运装卸自动线
发布项目及成果简述

本成果研发了工件上下料、转运、装卸专用机器人及其配套的自动料库,优化了感应加热和压力淬火工艺与设备,研究了系统节能控制模型及集成控制系统,实现了同步器齿圈等薄壁零件的高效、高质量绿色淬火生产,保证了批量零件淬火质量一致性,能有效提高产品质量和市场竞争力。该自动线已在赣州群星机械有限公司装备应用。
本成果可广泛用于环类、盘类、套类、轴类零件的淬火、表面强化等自动化生产,具有生产效率高、运行平稳可靠、产品质量稳定且一致性好、操作维护简便、安全性高等特点;还可推广应用于零件铸造、锻造等生产线的自动上下料、装卸转运等作业。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、刘金根、黄朝志、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目2:
项目名称
汽车同步器齿圈调频感应加热压力淬火一体化机床
发布项目及成果简述

本成果系统开发了调频感应加热与能量控制技术、柔性动态模具及防工件变形的动态加压技术和智能控制的淬火液可控喷射系统等,并按系统集成原理将工件自动上料机和下料机、感应加热机床、压力淬火机床、工件转运装卸机器人、能量管理和智能控制等集成于一体,形成了同步器齿圈调频感应加热压力淬火一体化机床,提高了设备的智能化和运行可靠与稳定性,更有效的实现了同步器齿圈等薄壁零件的高效、高质量的绿色淬火生产,大大提高了产品质量和市场竞争力。该智能化机床已在赣州群星机器人公司实现产业化,并在赣州群星机械有限公司生产线上装备,实现调频感应压淬机床的数控和智能检测与监控。
本智能装备可广泛用于环类、盘类、套类、轴类零件的淬火、表面强化等自动化生产,具有生产效率高、运行平稳可靠、产品质量稳定且一致性号、操作维护简便、安全性高等特点。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、刘金根、黄朝志、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目3:
项目名称
汽车同步器自动检测与装配机器人系统
发布项目及成果简述

 本成果研究了一种优化选配方法并由计算机实现齿圈齿榖的优化配对,开发了基于在线自动检测的同步器性能检测技术以及后续零件的自动定位与装配技术;研发了相应的计算机自动选配系统、自滑性和倾斜性一体化自动检测机和弹簧-卡块-钢珠自动定位装配机,并应用DNC数字化车间技术,研发了集传感检测、零部件跟踪、数控加工与在线精密测量、机器人和计算机等技术于一体的汽车同步器自动检测与装配机器人系统。该系统通过自动上下料库、振动供料装置、装夹转运机器人、输送链以及相应的网络化控制系统等将齿毂齿套供料机、齿圈齿榖计算机自动选配系统、自滑性和倾斜性一体化自动检测机、装夹转运机器人、弹簧-卡块-钢珠装配机、装配输送机等构成智能化装备系统,实现汽车同步器齿圈齿榖选配及弹簧、卡块、钢珠装配的智能化,可大大提高同步器装配质量和效率,降低劳动强度。
本成果研究了一种优化选配方法并由计算机实现齿圈齿榖的优化配对,开发了基于在线自动检测的同步器性能检测技术以及后续零件的自动定位与装配技术;研发了相应的计算机自动选配系统、自滑性和倾斜性一体化自动检测机和弹簧-卡块-钢珠自动定位装配机,并应用DNC数字化车间技术,研发了集传感检测、零部件跟踪、数控加工与在线精密测量、机器人和计算机等技术于一体的汽车同步器自动检测与装配机器人系统。该系统通过自动上下料库、振动供料装置、装夹转运机器人、输送链以及相应的网络化控制系统等将齿毂齿套供料机、齿圈齿榖计算机自动选配系统、自滑性和倾斜性一体化自动检测机、装夹转运机器人、弹簧-卡块-钢珠装配机、装配输送机等构成智能化装备系统,实现汽车同步器齿圈齿榖选配及弹簧、卡块、钢珠装配的智能化,可大大提高同步器装配质量和效率,降低劳动强度。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、刘金根、黄朝志、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目4:
项目名称
瓶装药液可见异物视觉检测机器人系统
发布项目及成果简述
 本成果基于机器视觉技术,研发了一种适合国内制药标准和生产环境的瓶装药液可见异物(玻璃屑、铝屑、纤维、毛发等微小不溶性异物)视觉检测机器人系统,将机器视觉检测、光源照明、液体中异物检测技术融合集成,采用“药瓶高速旋转-急停-相机拍摄序列图像”的技术方案,研究了亚像素级图像配准方法、自适应全变分去噪模型、可见异物分割算法、在线序列极限学习机算法(OS-ELM)以及可见异物检测、识别、分类算法等理论,开发了基于视觉检测机器人系统的机器人机械结构、电气控制系统等。取代了暗室人工灯检法检测药液瓶内可见异物。本成果开发的瓶装药液可见异物视觉检测机器人系统对可见异物检测准确性、可靠性、可重复性、检测精度和速度以及稳定性等完全能满足制药标准。本成果还可推广应用于饮料、食品等领域。
本成果基于机器视觉技术,研发了一种适合国内制药标准和生产环境的瓶装药液可见异物(玻璃屑、铝屑、纤维、毛发等微小不溶性异物)视觉检测机器人系统,将机器视觉检测、光源照明、液体中异物检测技术融合集成,采用“药瓶高速旋转-急停-相机拍摄序列图像”的技术方案,研究了亚像素级图像配准方法、自适应全变分去噪模型、可见异物分割算法、在线序列极限学习机算法(OS-ELM)以及可见异物检测、识别、分类算法等理论,开发了基于视觉检测机器人系统的机器人机械结构、电气控制系统等。取代了暗室人工灯检法检测药液瓶内可见异物。本成果开发的瓶装药液可见异物视觉检测机器人系统对可见异物检测准确性、可靠性、可重复性、检测精度和速度以及稳定性等完全能满足制药标准。本成果还可推广应用于饮料、食品等领域。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:葛 继、刘飞飞、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目5:
项目名称
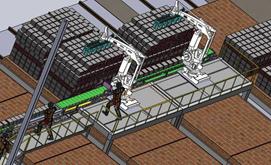
有色金属永久阴极机器人剥片自动线
发布项目及成果简述


该成果属于矿冶智能装备范畴,基于机器人及其周边设备技术研发及应用的成果,实现将电解精炼中吸附于永久阴极的高纯度金属从阴极上连续自动剥离的生产要求。自动线由阴极板自动输送装置、移载与搬运机器人、剥片装置、阴极板收集打捆机、永久阴极排列链、自动线控制系统及其过程监测与跟踪系统等组成,控制系统采用西门子PLC为核心控制器,并配工控机作为上位机,实现系统的操作和运行监控。自动线的剥片过程对永久阴极和精炼金属阴极板损伤小,剥片效率高、质量好;采用机器人实现各个工序的协调作业又能相对独立;对不同规格的阴极板和工艺要求,通过编程和更换末端剥片装置即可满足,调节变换方便、设备体积小、空间利用率高、灵活性好、适应性强。
本成果已应用于铜电解生产,其处理能力为500块载铜阴极/h。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、林飞、黄朝志
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目6:
项目名称
电解阳极板提取机器人
发布项目及成果简述
 本成果利用机器人技术,研发了电解阳极板提取机器人,能对浇铸成型且与铸模脱离的阳极板准确提取并送入水冷池冷却,实现整个工艺过程连续和自动化。与传统采用油缸和拖钩方式拖曳阳极板耳部提取相比,本成果具有自动化程度高并能实现无级调速、改善了作业环境、降低了劳动强度、提高了生产效率、结构简单、易实施、运行可靠等优点。成果已应用于铅、锌、铜等金属阳极自动浇铸机组。
本成果利用机器人技术,研发了电解阳极板提取机器人,能对浇铸成型且与铸模脱离的阳极板准确提取并送入水冷池冷却,实现整个工艺过程连续和自动化。与传统采用油缸和拖钩方式拖曳阳极板耳部提取相比,本成果具有自动化程度高并能实现无级调速、改善了作业环境、降低了劳动强度、提高了生产效率、结构简单、易实施、运行可靠等优点。成果已应用于铅、锌、铜等金属阳极自动浇铸机组。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、刘金根、林飞、黄朝志
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目7:
项目名称
全自动钢带打捆机
发布项目及成果简述
 该成果属于物流自动化装备领域。针对有色冶炼行业的阴极板、模铸锭、桶装亚砷酸以及化工、钢铁、建筑等行业的产品打包作业要求,应用机电一体化技术和现代设计方法研发的全自动钢带打捆机,其核心是打捆机头。全自动钢带打捆机由钢带矫直机构、送带装置、挡带装置、扣仓、自动送扣装置及锁扣剪带装置等组成。其特点是气动控制,打包速度快,工作效率高;锁紧力大,性能稳定,使用寿命长;设计精巧,结构紧凑,占用空间小;采用PLC控制实现全自动化,钢带打包物外形平整美观,便于装卸运输。
该成果属于物流自动化装备领域。针对有色冶炼行业的阴极板、模铸锭、桶装亚砷酸以及化工、钢铁、建筑等行业的产品打包作业要求,应用机电一体化技术和现代设计方法研发的全自动钢带打捆机,其核心是打捆机头。全自动钢带打捆机由钢带矫直机构、送带装置、挡带装置、扣仓、自动送扣装置及锁扣剪带装置等组成。其特点是气动控制,打包速度快,工作效率高;锁紧力大,性能稳定,使用寿命长;设计精巧,结构紧凑,占用空间小;采用PLC控制实现全自动化,钢带打包物外形平整美观,便于装卸运输。
 本成果能代替人工在危险有毒害环境下工作,提高安全性。已应用于铜电解阴极板、锌锭、桶装亚砷酸成品打捆等;针对应用需要调整后也可推广应用于基于PVC 和PET带的物品打捆作业。
本成果能代替人工在危险有毒害环境下工作,提高安全性。已应用于铜电解阴极板、锌锭、桶装亚砷酸成品打捆等;针对应用需要调整后也可推广应用于基于PVC 和PET带的物品打捆作业。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、刘金根、黄朝志、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目8:
项目名称
有色金属步进式在线连续溶浸机器人系统
发布项目及成果简述
该成果属于矿冶机电装备领域。用于由溶浸采矿法开采的铜、铀、离子型稀土等有色金属资源的开采提取装备。离子型稀土资源开采的原地浸矿工艺(即溶浸)具有不搬山、不破坏植被等优点,但存在稀土回收率取决于矿床底板结构,可能导致浸取液渗流污染地下水和周边环境,相应带来离子型稀土资源浪费、回收率不稳定等问题。据此,本成果研究了“离子型稀土资源动态微池强化浸取新工艺”,并基于仿生学原理和机器人技术,开发了新一代离子型稀土资源绿色高效开发工艺技术装备——有色金属步进式在线连续溶浸机器人系统。
本成果特点是“集实时步进与掘进、矿土搅碎与输送、在线浸取过滤、浸取剂与浸出液输送、浸取渣推出与充填、超声定位与转向控制、在线元素快速分析、遥控与供电于一体化”的仿生机器人系统,按周期循环作业实现连续掘进和浸取,既能提高资源回收率,又能防止浸取液对地下水和周边环境污染,实现资源的高效绿色利用。
尤其对于难以用传统开采工艺方式回收细脉矿带资源,本成果将作为细脉矿带资源的低成本开采的一种智能化采矿机器人系统。与数字矿山相结合,将实现矿山开采与装备智能化,能有效延拓矿产资源可利用量,形成具有划时代意义的创新矿山开发新工艺和新装备技术体系。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、林飞、黄朝志
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
项目9:
项目名称
砖坯机器人码垛搬运自动线
发布项目及成果简述

本成果设计了可靠高效的末端抓坯装置,并与高柔性的搬运机器人集成,实现了通过编程和更换抓坯装置以适应多砖型码坯要求的砖坯机器人码垛搬运自动线。设备系统具有工作平稳、速度快、码坯精度高、设备体积小、安装方便等特点,能快速适应多砖型码坯要求,抓坯力量可控,可码放薄壁大尺寸的砖型。
本成果已在合作企业产业化并在砖厂装备且稳定运行,日产达50万块砖(折标砖),可适应130523.B-HFWL空心砖、KP1等砖型的码放要求,调节更换时间短,砖坯良品率和生产效率高。

项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、林飞、杨哲勤
电话:0797-8312581、13607979162
邮箱:gzlff@126.com、1091772867@qq.com
项目10:
项目名称
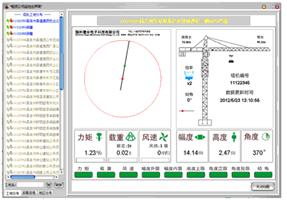
基于物联网的塔式起重机运行状态与安全智能监控技术及系统


发布项目及成果简述
本成果以2005年省重点攻关计划项目研究为基础,于2008年在国内率先应用物联网(传感器网络)技术,以解决塔机运行安全的智能监控、违规作业监管及塔机管理等重大技术需求并实现塔机运行安全综合监控与管理为技术目标,将塔机机电部件运行安全监测和预测监控、单(群)机防碰撞、操作员疲劳识别和指纹授权、塔机定位GIS和远程监控、移动安全信息发布与事故追索管理等功能融于一体,开发了基于物联网的塔机运行安全智能监控技术与系统。
成果已授予计算机软件著作权1项、发明专利2项并获省科技进步三等奖、有色金属工业科学技术二等奖、赣州市科技进步二等奖等奖项,取得了国家特种设备型式试验合格证;本成果在赣州德业电子科技有限公司实现了产业化和应用于全国十多个省市;还成功应用于施工升降机运行安全监控上。本成果使塔机事故率降低到1.5‰,促进了我国塔机、施工升降机等建筑施工设备的安全监控数字化、信息化建设水平提高。
项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、唐宏、黄朝志、林飞
电话:0797-8312581、13607979162、13766333195
邮箱:gzlff@126.com、1091772867@qq.com
基于物联网的塔式起重机运行状态与安全智能监控技术及系统
● 发布成果简述
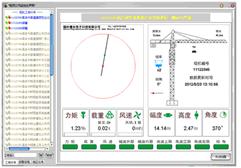
 该成果属于生产设备安全、计算机测控和信息技术领域。塔式起重机(下称塔机)是建筑业的主要吊运设备,属特种设备。随着建筑业迅速发展,我国塔机已突破40万台,但因超载、误操作等引发塔机倾倒等重大事故率也逐年攀升,造成了重大的人员财产损失。国家对此高度重视,颁布了《塔式起重机安全规程》等文件。本成果以2005年省重点攻关计划项目研究为基础,于2008年在国内率先应用物联网技术,以解决塔机运行安全的智能监控、违规作业监管及塔机管理等重大技术需求并实现塔机运行安全综合监控与管理为技术目标,将塔机机电部件运行安全监测和预测监控、单(群)机防碰撞、操作员疲劳识别和指纹授权、塔机定位GIS和远程监控、移动安全信息发布与事故追索管理等功能融于一体,研究基于物联网的塔机运行安全智能监控技术与系统。
该成果属于生产设备安全、计算机测控和信息技术领域。塔式起重机(下称塔机)是建筑业的主要吊运设备,属特种设备。随着建筑业迅速发展,我国塔机已突破40万台,但因超载、误操作等引发塔机倾倒等重大事故率也逐年攀升,造成了重大的人员财产损失。国家对此高度重视,颁布了《塔式起重机安全规程》等文件。本成果以2005年省重点攻关计划项目研究为基础,于2008年在国内率先应用物联网技术,以解决塔机运行安全的智能监控、违规作业监管及塔机管理等重大技术需求并实现塔机运行安全综合监控与管理为技术目标,将塔机机电部件运行安全监测和预测监控、单(群)机防碰撞、操作员疲劳识别和指纹授权、塔机定位GIS和远程监控、移动安全信息发布与事故追索管理等功能融于一体,研究基于物联网的塔机运行安全智能监控技术与系统。
成果关键技术包括智能传感检测、部件剩余寿命预测和状态评价建模、多协议通信网络集成、基于机器视觉的疲劳识别算法和基于Mesh网络的群塔通信和防碰撞算法等。成果已授予计算机软件著作权1项、发明专利2项并获省科技进步三等奖、有色金属工业科学技术二等奖、赣州市科技进步二等奖等奖项,取得了国家特种设备型式试验合格证;实现了产业化和应用于全国十多个省市。本成果使塔机事故率降低到1.5‰,在促进我国塔机安全监控数字化、信息化建设进程和提升行业整体技术水平及国际竞争力方面发挥了显著作用,社会和经济效益显著。
● 成果对接联系信息
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、唐宏、黄朝志、林飞
电话:0797-8312581、13607979162
邮箱:gzlff@126.com、1091772867@qq.com
项目11:
项目名称
高效免拆带的有色金属铸锭打包机研制及应用
发布项目及成果简述
本成果涉及有色金属锭打包领域,尤其是铜、锌、铝锭等的免拆洁净打包生产工艺及装备。
产品打包对提高装卸转运效率、降低劳动强度、保护产品质量具有重要作用,尤其在有色金属冶炼行业,铜、锌、铝等金属在浇铸成锭后需分散转运至各地进行熔铸加工,而金属铸锭质量体积较大,散装转运不仅效率低、劳动强度大,而且存在安全隐患,因此,打包显得尤为重要。目前有色金属铸锭的打包主要采用钢带式打包机进行打包,该类打包方式存在钢带拆卸难度大等问题,在熔铸时一般不对其进行拆卸直接将钢带与金属铸锭同时倒入熔炉进行熔铸,但钢带的熔入会引入额外的金属成份,干扰有色金属熔铸成份的控制,影响熔铸质量。为此,本项目成果为克服金属扎带的干扰以及目前有机捆扎带打包机捆扎强度不高等难题,基于高强度PET带及强力捆扎技术研制了高效免拆带的有色金属铸锭打包机。该打包机包括机器人码垛系统、成垛物料输送系统、升降换向系统、穿剑打包系统、输送卸车系统、托盘循环系统等,其采用的高强度PET带熔点在260摄氏度左右,在接触高温时直接气化,因此,可随金属铸锭一同投放至熔炼炉而不影响熔铸金属成份。本项目成果的打包机通过采用先进的自动控制技术及机器人技术,基于系统工程和模块化设计理论,实现了物料堆垛、打包、卸垛过程的无人化作业及托盘的自循环利用,具有高效节能、低劳动强度、连续作业稳定等特点,且各子系统独立性较强,易于安装调试和维护,为实现有色金属铸锭打包装备的标准化奠定了技术基础。本项目成果实现了有机捆扎带在重型物料自动打包领域的应用,除有色行业外,可进一步推广至建材、化工等行业。
围绕市场需求,攻克技术难点,项目成果的创新点:1)设计了基于有机捆扎带的有色金属铸锭自动打包工艺流程,建立了物料堆垛、打包、卸垛过程无人化作业的新工艺;2)系统研究并提出了基于机器人和自动化技术集成创新的物料码垛、输送、打包、转运和卸垛等工艺过程的自动化解决方案;3)开发了由机器人码垛系统、成垛物料输送系统、升降换向系统、穿剑打包系统、输送卸车系统、托盘循环系统等组成的无人化作业打包生产线及装备;4)深入研究了强力捆扎技术,开发了多次拢紧,依次拢紧力递增的新型捆扎工艺,研制了在捆扎带低张力条件下的稳固捆扎装备。
项目成果已取得多项专利,实现产业化量产,可促进我国在重型物料自动打包领域的改革创新,提升打包行业整体技术水平,在推动我国重型打包技术进步发挥了显著作用,为进一步实现我国有色金属铸锭打包生产标准化、绿色化和智能化提供了坚实的技术支撑。


项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、林飞、杨哲勤
电话:0797-8312581、13607979162
邮箱:gzlff@126.com、1091772867@qq.com
项目12:
项目名称
城市地下综合管廊智能巡检机器人系统
发布项目及成果简述
本成果主要涉及用于城市地下管廊、矿山井下、电站、污水处理、养殖场等环境巡检任务的智能巡检机器人系统。
城市地下综合管廊把市政、电力、通讯、燃气、供水排水等各种管线集于一体,在城市道路的地下空间建造一个集约化的隧道。地下综合管廊短则几公里、长则数十公里,地下综合管廊的运维情况极其复杂。现有的综合管廊巡检监控主要是人工巡检为主,物联网传感器监控为辅。人工巡检主要是通过人下到地下管廊,在管廊内通过人眼识别管廊内的相关设备、环境等等,物联网传感器定点监控相应布控点的环境、设备状态等。巡检人员不可能完全实时掌握地下管廊运行工况,可能出现盲区。为减少或不出现盲区则要增加监测、传感设备,致使增加管廊后期造价;人工巡检方式还使巡检人员在通风差、昏暗及可视度低、狭窄空间等环境作业,管廊内还存在易燃易爆有毒气体、涌水、火灾等隐患,对巡检人员构成较大的生命威胁;人工巡检信息实时性差,难于科学管理与决策支持及城市管理智能化等。
据此,本项目成果开发了基于人工智能、移动机器人、机器视觉、无线传输、有线传输以及互联网技术的地下综合管廊智能巡检机器人系统。系统可根据实际环境巡检功能要求,设计成轨道运动巡检型、垂直升降巡检型、带机械臂巡检作业型、地面移动巡检型、多级组合型等多种结构类型。机器人总成主要由行走小车、供电装置、环境参数检测装置、通信装置、连接装置及定位与摄像装置、监控中心或云平台等主要功能部分组成。该系统可搭载热成像仪、机械手、灭火器、火灾探测及毒气检测仪等工具,对管廊内的电力、水力、通讯管线等设施动态巡检与在线监测其表面外观与实时发热情况、燃气泄漏、水管破损泄漏情况及火灾隐患与消除等综合监测、定位与分析诊断;对监测所积累的大数据,可构建城市管廊的无人监控和安全运维智能系统。
本项目成果开发的城市地下综合管廊智能巡检机器人系统具有广发的应用前景,除用于城市地下管廊的综合智能巡检与管理外,还可根据应用场所需求,搭载热成像仪、声呐、机械手、切割机、灭火器、毒气检测仪等传感器或专用工具,实现对各种隐蔽空间、水下、易燃、易爆、辐射等高危场所进行实时影像检测、分析处理。可推广应用于电站、污水处理、养殖场、监狱以及矿山地下开采涉及的运输、通风、供水、供电、通信、排水、岩体迁移等井下环境的智能监测与巡检。




项目成果对接
单位:江西理工大学电气工程与自动化学院
联系人:刘飞飞、林飞、邹祥和
电话:0797-8312581、13607979162
邮箱:gzlff@126.com、1091772867@qq.com




